
Most tree harvesters grab the trunk and shake it until the the nuts or fruit fall off. But some trunks or stems are not stiff enough or durable enough to deliver enough energy to the fruit to get it to detach. So I designed this harvester to deliver the vibrational energy closer to the fruit by penetrating the canopy with oscillating fingers. Similar style harvesters do already exist, but this one was built to be mounted an a manipulator arm with many degrees of freedom so that they could test different elevations and angles of approach. It also is designed so that the eccentricity can be changed and then re-balanced.

The main vertical shaft visible here oscillates laterally due to it being mounted eccentrically from the motor shaft.
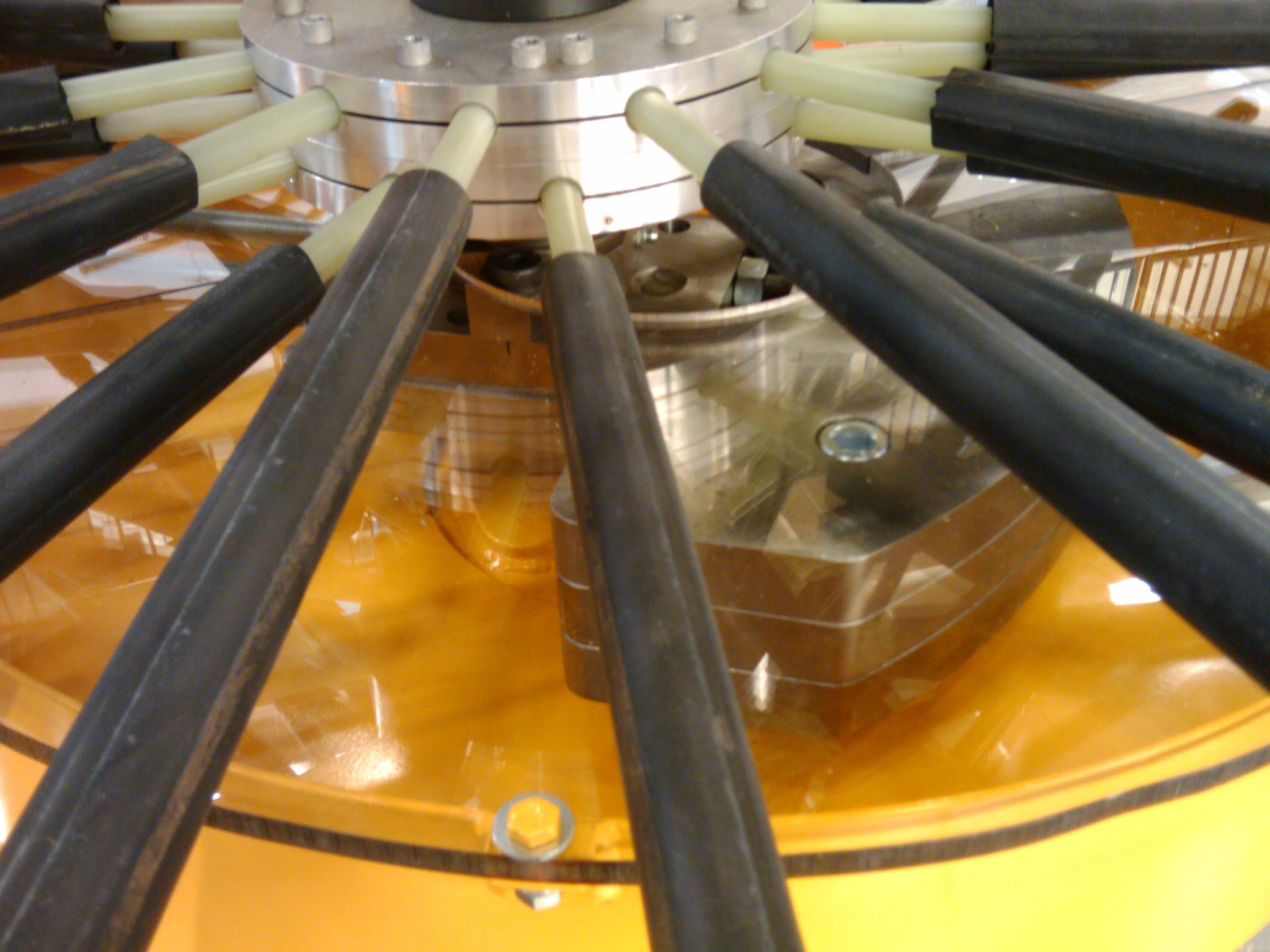
Cover over the eccentric counter weights.

Rear counter weights so it balances on the manipulator arm.
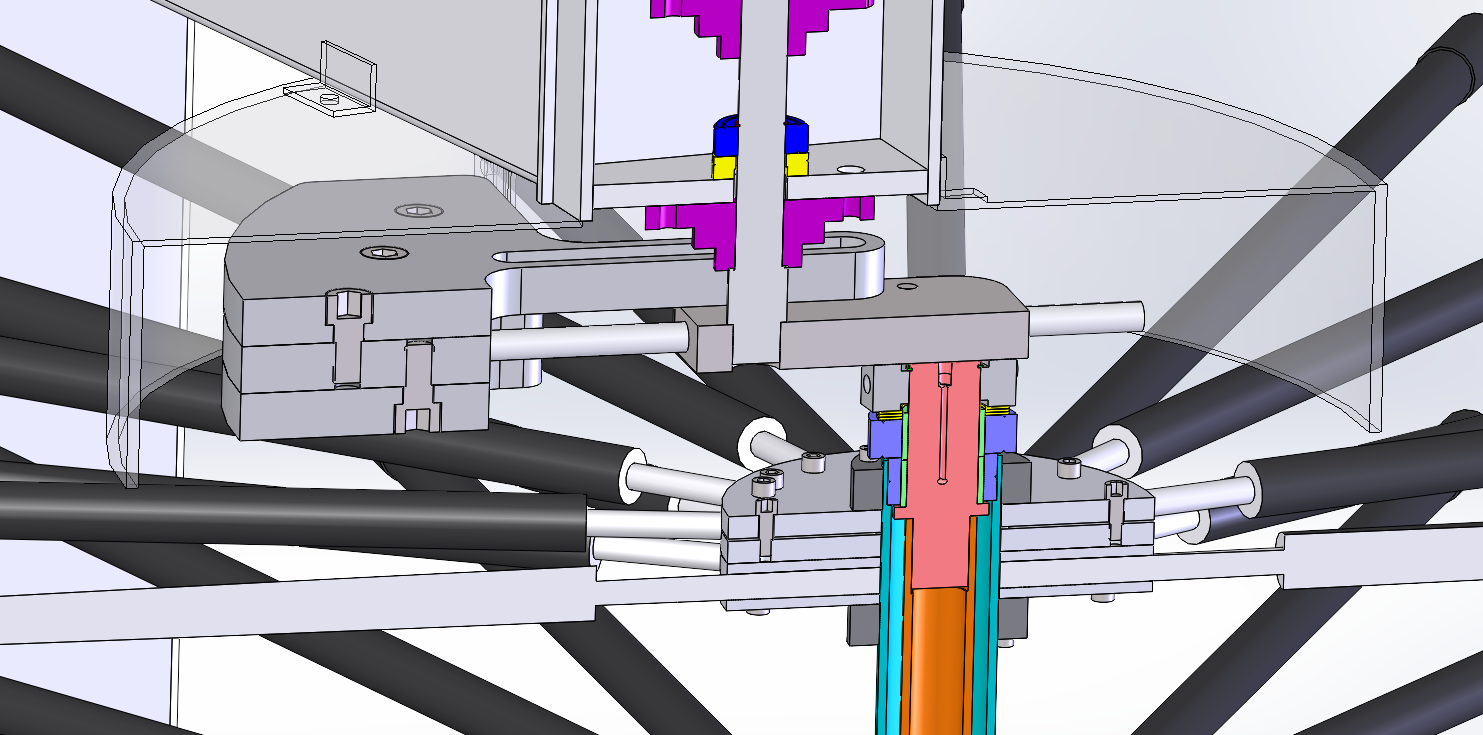
Motor shaft, eccentric mount, counter weights, drive tube, and freewheeling tube.